Innovative deep learning solutions leveraging unlabeled and multi-source annotated datasets to segment and monitor change in large-scale 3D point cloud for Digital Twin Cities
A Digital Twin City (DTC) is a virtual representation of physical assets across their respective life cycles in a city. This is an emerging concept that has become the centre of attention for academia in more recent years. The rapid development of mobile LiDAR system (MLS) provides large-scale, accurate and affordable 3D point clouds (PCs) at a city-scale. These data offer high-quality geometric measurements but limited non-geometric semantics, such as object type and topological relationships. Therefore, semantic segmentation is a fundamental perception task for the massive datasets used in DTC creation.
In recent years, the development of deep neural networks (DNNs) has led to great success in 3D PC semantic segmentation while focusing on designing fully supervised networks for densely annotated data. However, such massive 3D point-wise annotation is time-consuming, labour-intensive, and error-prone. As a result, current effort is in developing efficient methods for creating more labels or learning from cheap supervision (i.e. little annotation or simulated data).
DTC involves 4D dynamic objects. Since LiDAR provides a snapshot of the DTC at a certain timestamp, there is a need to detect and understand changes in multi-temporal LiDAR datasets. Performing change detection in street-level PC streams is often a significantly complex task. One must expect a large variety of object shapes and appearances, numerous occlusion artifacts between the different objects, and a lack of accurate registration between the compared datasets. There is a crucial lack of studies using DNNs to address this problem. Furthermore, DTC creation should be addressed with a focus on automatic updating because a city is constantly changing. Existing urban 3D modelling methods are limited in this respect.
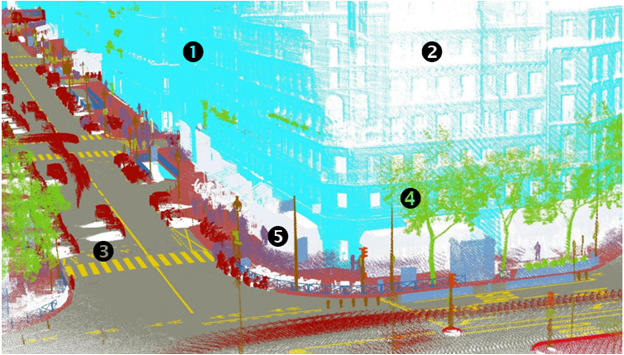
(Figure : Large-scale outdoor datasets (1-2 : uneven point density; 3 : significant occlusion; 4 : complex shape; 5 : noise))